Navigace robotů pomocí kamerových systémů
Kamerové systémy jsou určeny pro přesnou navigaci ve výrobě, kde polohování bez zpětné vazby již není dostatečné.
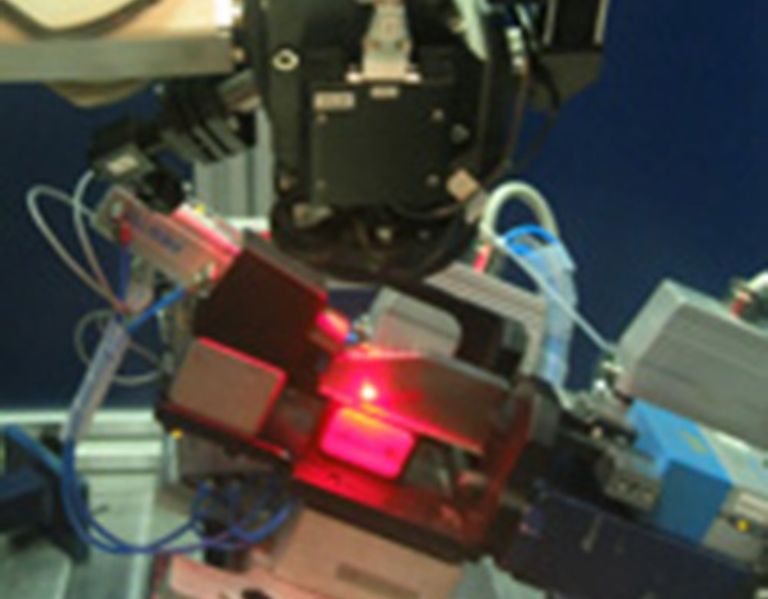
Příkladem užití je 3D navigace robota při laserovém svařování, kdy je potřeba provést svar s vysokou přesností. Pro splnění této úlohy byl do svařovací hlavice Trumpf integrován kamerový systém postavený na metodě laserové triangulace. Pro dosažení požadované přesnosti měření 0,02mm byla vyvinuta unikátní 3D kalibrace. Realizované řešení zaručuje, že svár je proveden na požadovaném místě a má předepsanou kvalitu a pevnost.
Sekvence měření a korekce souřadnic robota obvykle zabere méně než 1s. Nasnímaná data se archivují pro možnost dalšího statistického zpracování s možností zasílat výsledné hodnoty nadřazenému systému.
Dalšími příklady užití kamerových systémů jsou např.: přesná manipulace s výrobky, kontrola kvality (rozměrů a tvarů) pomocí robota, přemisťování obecně orientovaných výrobků, robotické skenování ploch větších výrobků, atp.



| Parametr | Hodnota | Jednotka |
|---|---|---|
| Nejmenší velikost sledované oblasti | 8×8 | mm |
| Největší velikost sledované oblasti | 200×200 | mm |
| Rozlišení kamery | 1600×1200 | px |
| Přesnost měření | od ± 0,01 | mm |
| Rychlost snímání | < 1 | s |
| Teplota okolí | 5 – 35 | °C |
| Napětí | 24 | V |
| Komunikační rozhraní | Ethernet | – |
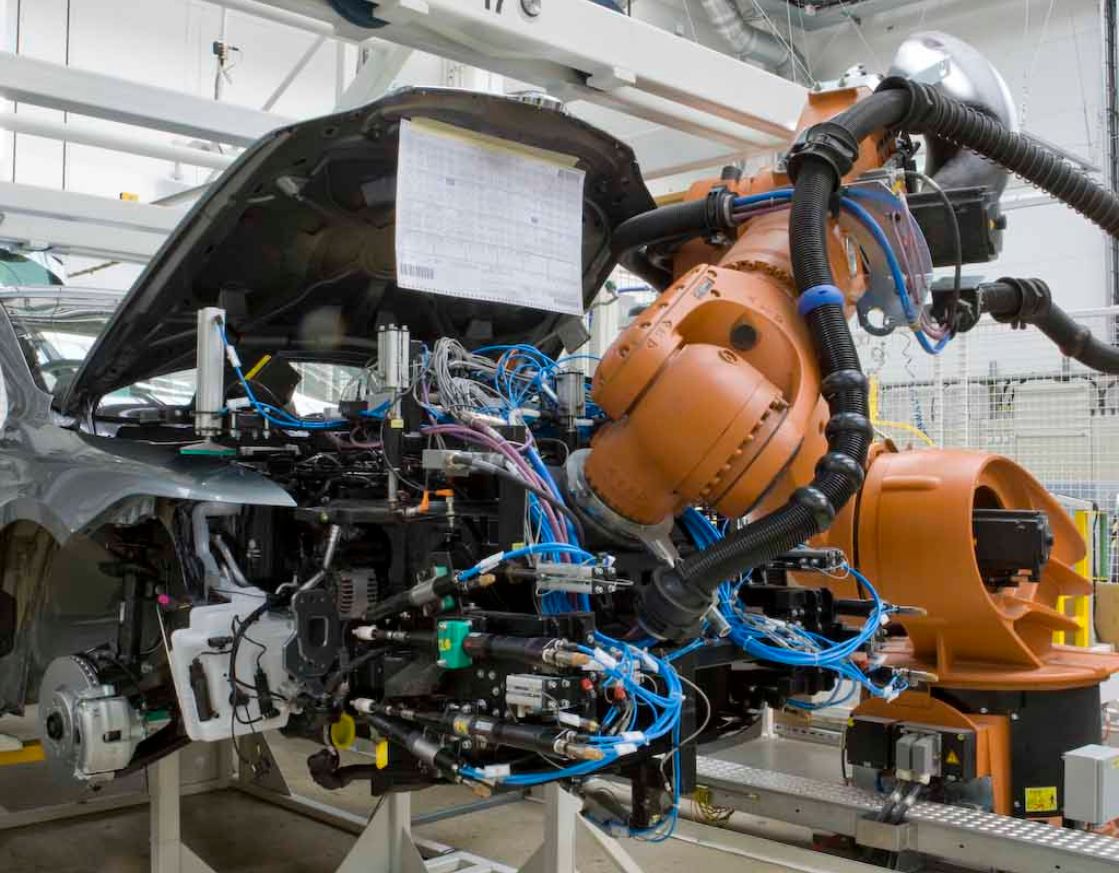
Dalším příkladem aplikace kamerových naváděcích systémů ve spojení s robotikou je osazování přední části automobilu (tzv. Frontendu) na montážní lince.
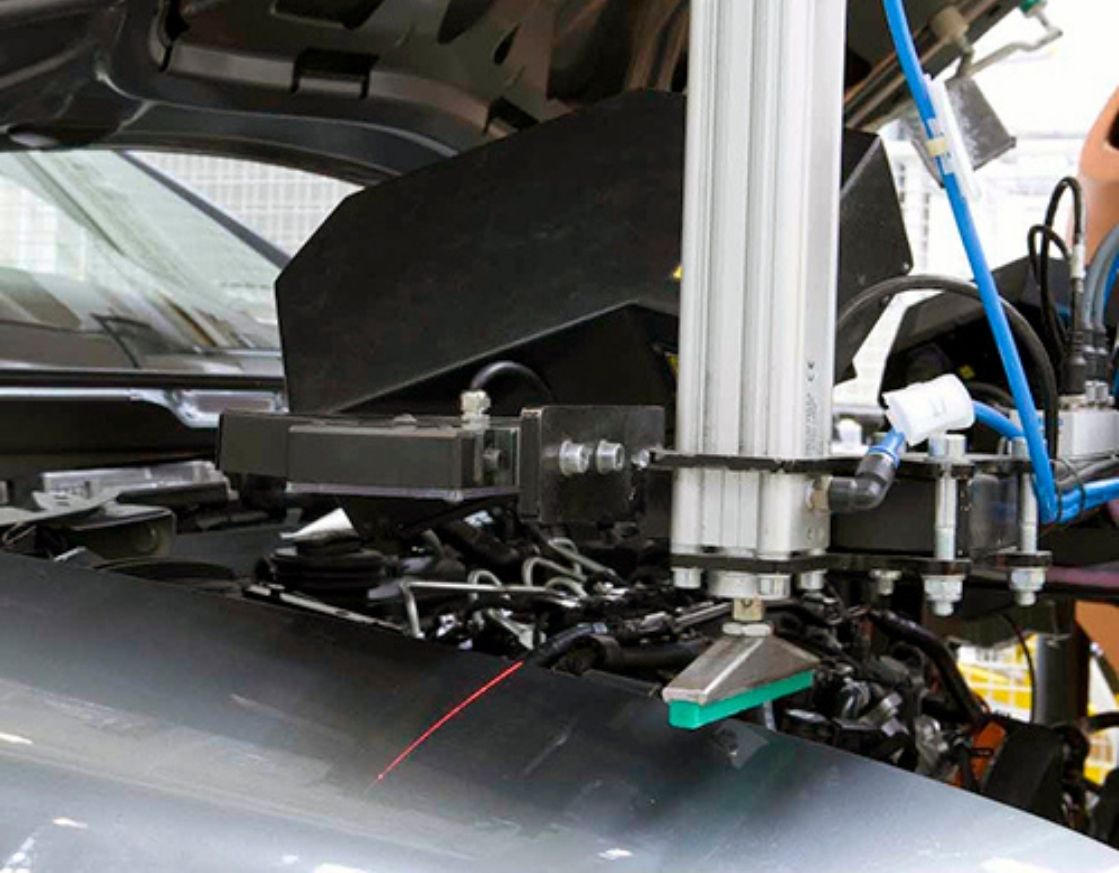
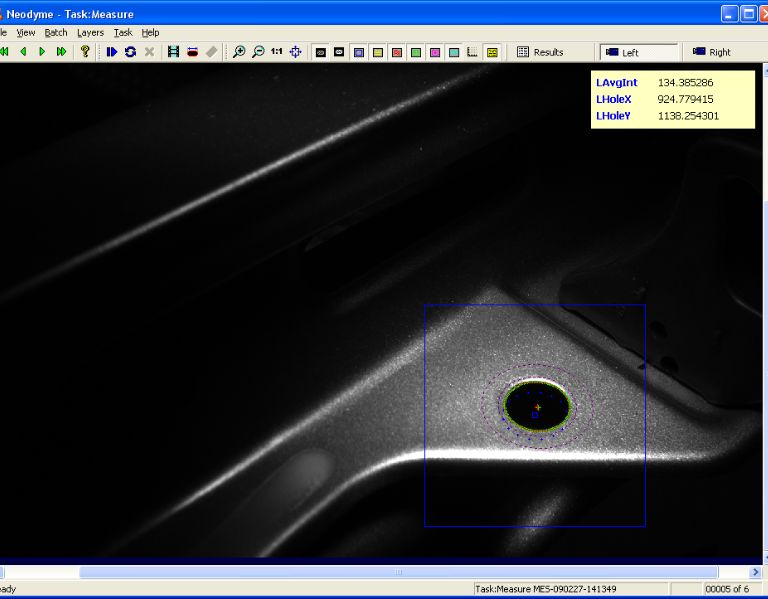
Po uchopení frontendu je nezbytné jeho přesné usazení do karoserie, aby byly zaručeny požadované rozměry pohledových spár přední části automobilu. Pro dosažení správného výsledku slouží speciální kamerové moduly, které měří ve 3D s přesností 0,1mm. Po změření polohy karoserie obdrží robot opravené souřadnice polohy karoserie a tím dojde k přesnému spasování dvou částí automobilu.
Sekvence měření a korekce souřadnic robota obvykle zabere méně než 2s. Nasnímaná data se archivují pro možnost dalšího statistického zpracování s možností zasílat výsledné hodnoty nadřazenému systému.
Součástí řešení je i unikátní 3D kalibrace kamerových modulů, která se spouští vlastním programem, trvá několik sekund a nevyžaduje zásah obsluhy. Tím je minimalizován prostoj montážní linky na minimum.

| Parametr | Hodnota | Jednotka |
|---|---|---|
| Přesnost měření | ± 0,08 | mm |
| Nejmenší velikost sledované oblasti | 10×10 | mm |
| Největší velikost sledované oblasti | 200×200 | mm |
| Pokrytí barevných odstínů | Bez omezení | – |
| Rychlost snímání | <1 | s |
| Rozměry kamerového modulu š×v×h | 280×100×180 | mm |
| Komunikace kamerového modulu s řídicím systémem robotu | Ethernet | – |
| Teplota okolí | 5 – 35 | °C |
| Napětí | 24 | V |